A collaboration between Antarctic- and Australian-based engineers, trades personnel, and sea ice scientists, has seen the successful installation of a fast-ice monitoring site on the fast ice near Davis station. Four Antarctic expeditioners recently spent three days installing technical equipment on the ice close to the station that will give engineers and scientists back in Australia near real-time access to a range of data — almost as if they were in Antarctica.
This year’s deployment is largely in support of a major research and development project involving an ice mass-balance station designed by the Australian Antarctic Division’s Science Technical Support (STS) group. The mass-balance station forms part of the Antarctic Fast-Ice Network (AFIN). This international, multi-location network aims to derive a baseline of Antarctic fast-ice extent and volume, to observe change in these parameters, and to explore the ocean-ice-atmosphere system.
In contrast to the Arctic, where drifting ice mass-balance buoys have successfully been used, AFIN scientists battle to overcome the problem of under-water ice ‘accretion’ (attachment) on their equipment, which interrupts measurements. The research and development system involves a remotely-controlled camera installed under the ice, and a series of basic instruments embedded in the ice, which are observed by the camera. The instruments include various rulers to study material properties, simple ocean current meters, and a vertical string of 100 temperature sensors spaced 20mm apart. Various methods to inhibit or delay ice accretion or to dislodge so-called anchor ice are also being tested.
The Australian AFIN project is being led by Dr Petra Heil and reports into the Australian-led international AFIN programme. The updated system deployed at Davis has been designed and put together by engineers Mark Milnes and Kym Newbery from the Australian Antarctic Division’s Science Technical Support (STS) group. Its installation was carried out by electrician Tony Bojkovski, carpenter Rick Besso, electronics engineer David Tulloh, and station doctor Lloyd Fletcher.
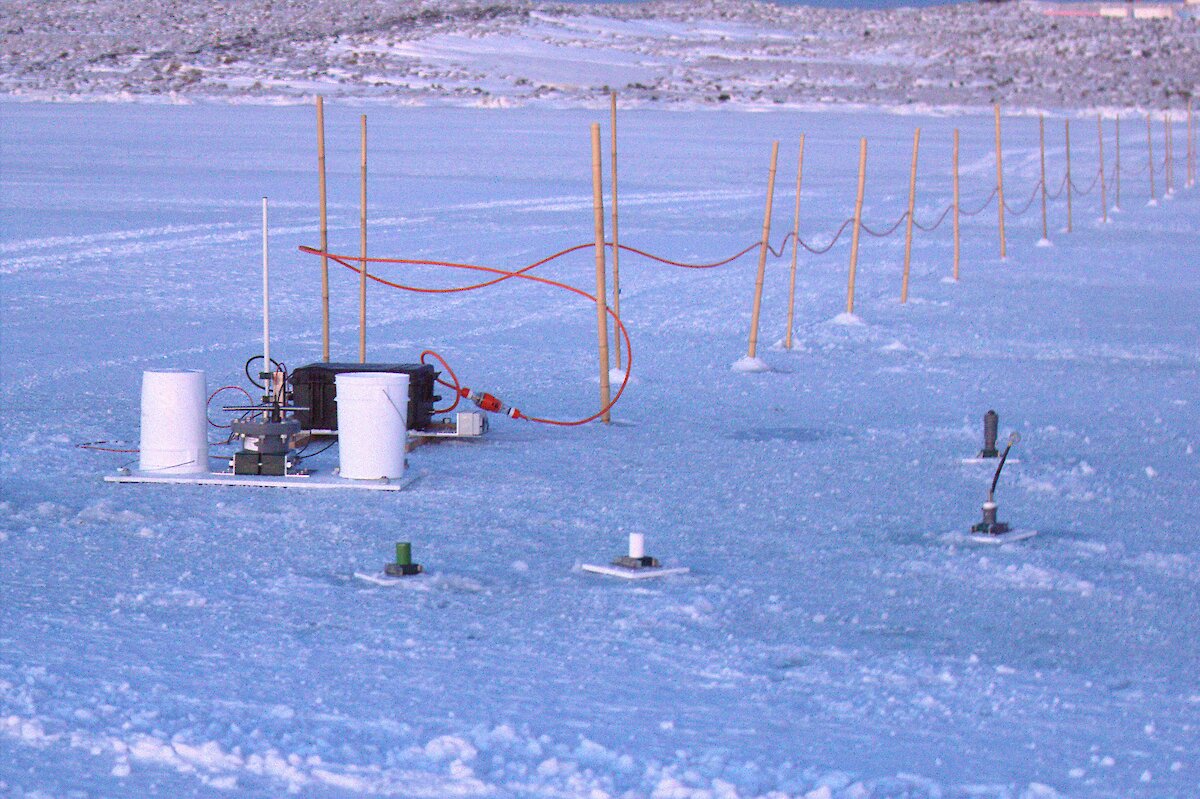
While running the fast-ice experiment properly requires relatively little power, a power cable was run to the site, half a kilometre across the fast ice for heating, to ensure no ice platelets (ice crystals freely floating in the water column) would accrete on the under-water camera. To avoid having the cable melt into the ice, it was suspended on bamboo canes the entire distance. Control equipment installed at both ends of the power cable allow the experiment to be monitored and administered by the STS engineers in Australia
How the installation unfolded
Day 1: The power cable
A roller for the cable drum was attached to the front fork of a JCB forklift. The JCB was parked onshore next to the Davis Aquarium (the shore power point) and the cable pulled out onto the fast ice by hand. It was possible to pull the cable comfortably with two people, even dragging it across 500m of ice.
To keep the cable from melting into the ice we installed bamboo canes every five meters, roughly 100 canes in all. For each cane we had to drill a partial hole into the ice, place the cane and then fill the hole with water. The water froze, holding the cane firmly in place. To attach the power cable a small hole was drilled through the cane and the line tied on with wire. The canes were pre-cut to about two m long, and the wire was attached at knee height to reduce the forces on the canes in high winds.
Carpenter Rick demonstrated his farm fencing experience by placing marker canes to keep us in a straight line. He also introduced us to the proper wire tying procedure. For some reason mine never looked as pretty as his. Maybe they will after I practice on another few hundred posts!
By the end of the first day we had finished installing the power cable on canes from the shore to the experimental site on the fast ice: a beautifully constructed orange fence to nowhere.
Day 2: Instrumentation
The second day of work was slightly shorter but still very productive. Having placed the cable and determined precisely where the experiment would live, the focus was on the installation of the experiment.
The camera at the centre of the experiment sits at the bottom of a three metre-long plastic tube. This had to be deployed via a fairly large hole through the ice. To make life just a little more exciting, plastic tubes filled with air like to float so the camera had to be bolted down to prevent it from popping up out of the holes.
A large auger was used to drill the hole for the camera. With ice thickness about 0.7m it took a while. A wooden board was then placed over the hole and a threaded rod placed in the ice at each corner. Using the same technique as the bamboo canes we simply drilled a hole for the rod, dropped it in and filled it with water; it was actually fairly solid by the time the camera was in place. A round clamp was also secured to the wooden plate.
Finally, we carefully lowered the camera through the hole, trying hard not to scratch the perspex window on the ice. It naturally sat about half in the water and half above it, so we pushed it down and secured it with the clamp. Two frozen buckets of water were used as weights to hold the plate down while everything froze into position overnight.
Once the camera was secured, the control box was deployed in a similar manner. The other instruments were deployed in a circle around the camera so it can pan and tilt to observe each of them.
Day 3: Everything else
We started day three at the shore end. The shore power control box was installed inside the aquarium and connected to the power cable running to the experimental site. This finally allowed us to power up the instruments and to test them.
Also at the shore end we placed canes over the tide crack area. On the first day we cheated a little and started our caning on the nice simple flat ice. Where the ice meets the shore, things are a little more tricky, as vertical movement of the ice due to tides can be up to two metres. To cope with this we placed taller canes and put slack in the power cable between each one. The cable was also raised to eye level to allow for the slack as well as to keep the cable above any possible rafting (where a piece of sea ice piles up on top of another due to pressure).
Several remaining instruments were deployed using a small two-stroke auger. The last task was to wire up several of the instruments that require power to run their electronic sensors or for heating. Finally, we tested the network connectivity and camera itself, which all passed. After a lot of effort and a warm dinner we were rewarded with real-time footage of Antarctic krill swimming in front of the camera for us!
David Tulloh and Petra Heil