

Twenty metres beneath the ocean surface, a submersible robot is hard at work mapping the Antarctic sea-ice floe under our feet.
Its efforts will contribute to the first complete three-dimensional measurements of Antarctic ice floes, and inform the validation and calibration of satellite measurements that aim to provide ongoing large-scale assessment of sea ice thickness in East Antarctica.
The untethered robot, known as an Autonomous Underwater Vehicle or AUV, is part of an exciting new collaboration between Dr Guy Williams of the Antarctic Climate and Ecosystems Cooperative Research Centre (ACE CRC) and the Deep Submergence Laboratory at the Woods Hole Oceanographic Institution (WHOI) in the United States.
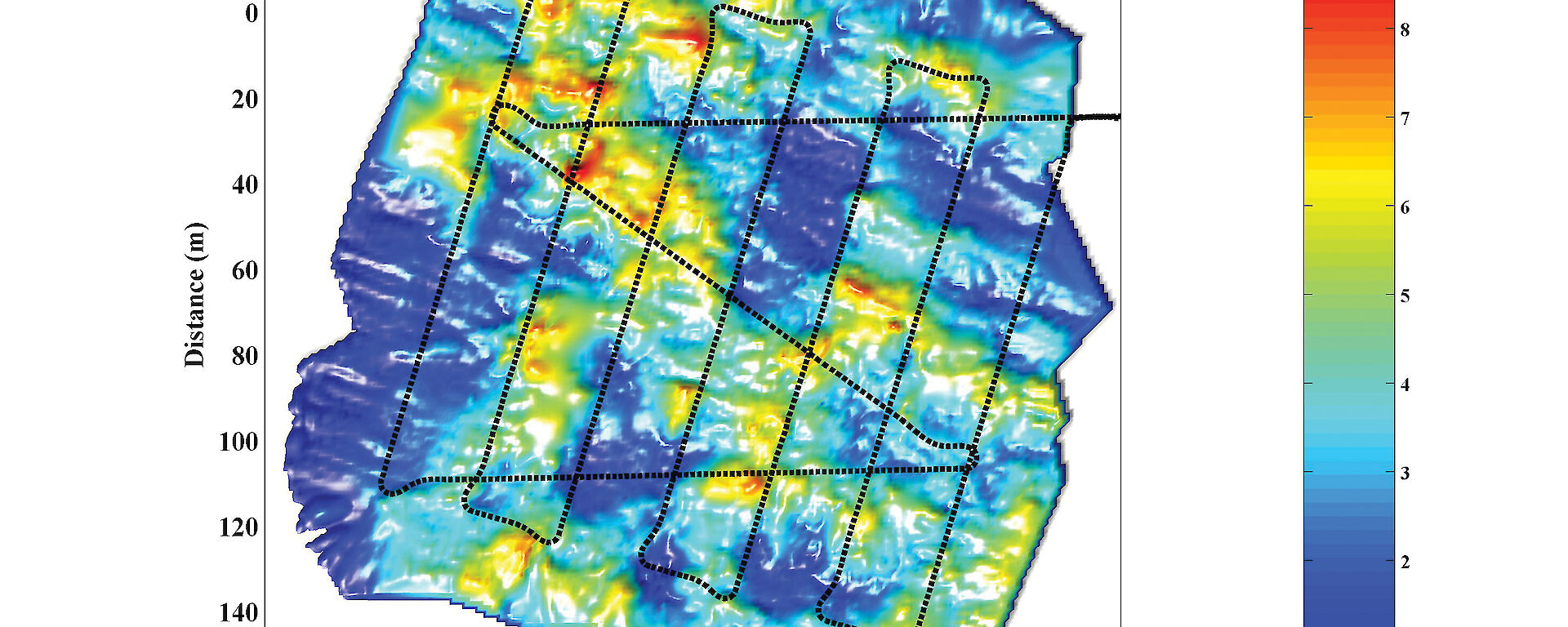
The dual-hulled AUV travels at 30cm per second in a “lawnmower” grid pattern at a constant depth of about 20m under the ice. It measures the three-dimensional ‘topography’ or shape of the base of an ice floe using an on-board instrument called a multi-beam sonar. The sonar works by sending out a swath of ‘pings’ and measuring the amount of time it takes for the sound to bounce back.
“The AUV is a huge step forward in our observational capability of how we measure sea ice thickness,” Dr Williams says.
“In the past we took drill line measurements or observed the ice thickness as we moved through it on the ship.”
Woods Hole AUV engineer, Dr Clay Kunz, says the AUV is from a line of ‘seabed class’ vehicles that are normally used to map the sea floor.
“For this Antarctic mission we’ve mounted all the navigation and scientific instruments on top of the vehicle so that they can measure the topography of the underside of the sea ice instead,” Dr Kunz says.
Data is stored in an onboard computer and then converted into a three-dimensional map at the end of each survey.
“The under-ice surface is very complex and dynamic and we need to measure this shape to be able to assess how much ice there is,” Dr Williams says.
“When we combine our 3-D view of the underside of the sea ice with surface measurements that we’ll get from other instruments, we’ll have a full 3-D map of the entire ice floe.”
This AUV work contributed to one of the major goals of the recent Sea Ice Physics and Ecosystem eXperiment-II (SIPEX-II) voyage — to obtain floe-scale and aerial measurements of sea ice thickness and snow cover, which can be used to validate and calibrate satellite measurements that provide a large-scale view of the amount of sea ice in East Antarctica.
Measuring life from light
The AUV also contributed to a key goal of the Remotely Operated Vehicle (ROV) project, which aims to measure sea ice algal biomass — the amount of microscopic plants living within and attached to the sea ice floes.
Both the AUV and the ROV are instrumented with specific light sensors called radiometers, which measure the amount of light penetrating the water column through the snow and ice above. Some of the light, in particular blue and green wavelengths, is absorbed by the photosynthetic pigments of the sea ice algae. As the light penetrates the water, phytoplankton (free-floating microscopic plants) absorb more. Thus, measurements of the reduction in blue and green wavelengths of light as they move through the ice and water column can be used to estimate how biologically active the sea ice is.
The results from the AUV’s radiometer will be compared to the biological patterns observed by the ROV, to see if the patterns can be detected at the operational depth range of the AUV (the AUV operates at about 20m below the ice while the ROV operates at about 2m). If successful, this could see AUVs conducting bio-optical surveys over much larger spatial scales on subsequent voyages.
As ice is predicted to thin in the future, these measurements could allow scientists to predict the resulting changes in the biomass of ice algae. As algae provide food for krill and zooplankton, scientists will also be able to determine the likely flow-on effects up the food chain.
WENDY PYPER
Australian Antarctic Division
