
The Antarctic coast is fringed by ice shelves — extensions of the continent’s thick ice cap that float on the ocean. Understanding how the ocean drives the melting of these ice shelves, known as ‘basal’ melting, is key to determining how Antarctica will respond to future change.
The underside of ice shelves are one of the most elusive regions of the Antarctic continent. Sea ice can impede access to the front of the ice shelves and iceberg calving can make it a dangerous place to be. However, an autonomous underwater vehicle (AUV) named nupiri muka* (‘eye of the sea’) can help.
nupiri muka is a 5000 metre depth-rated Explorer class AUV, developed by International Submarine Engineering, which collects data on ocean currents, conductivity (salinity) and temperature. It is equipped with a sonar system that measures the shape and depth of the sea floor (‘bathymetry’) and sub-bottom profiles (sediment layers beneath the sea floor), as well as a side-scan sonar (high resolution sonar imagery) and a magnetometer (magnetic sensor). To build a map of its surroundings, discern its location and avoid hazards, it uses additional acoustic sensors that ping upwards, downwards and forwards, as well as an inertial navigation system.
Because nupiri muka can measure the temperature and salinity of the ocean beneath ice shelves, it allows us to estimate the amount of heat entering and exiting the ice shelf cavity. The AUV also allows us to build a picture of the cavity, from the sea floor to the underside of the ice shelf, using sonar data. Yet these missions are technically difficult as the AUV is out of contact for long periods of time, in an environment with little hope of rescue.
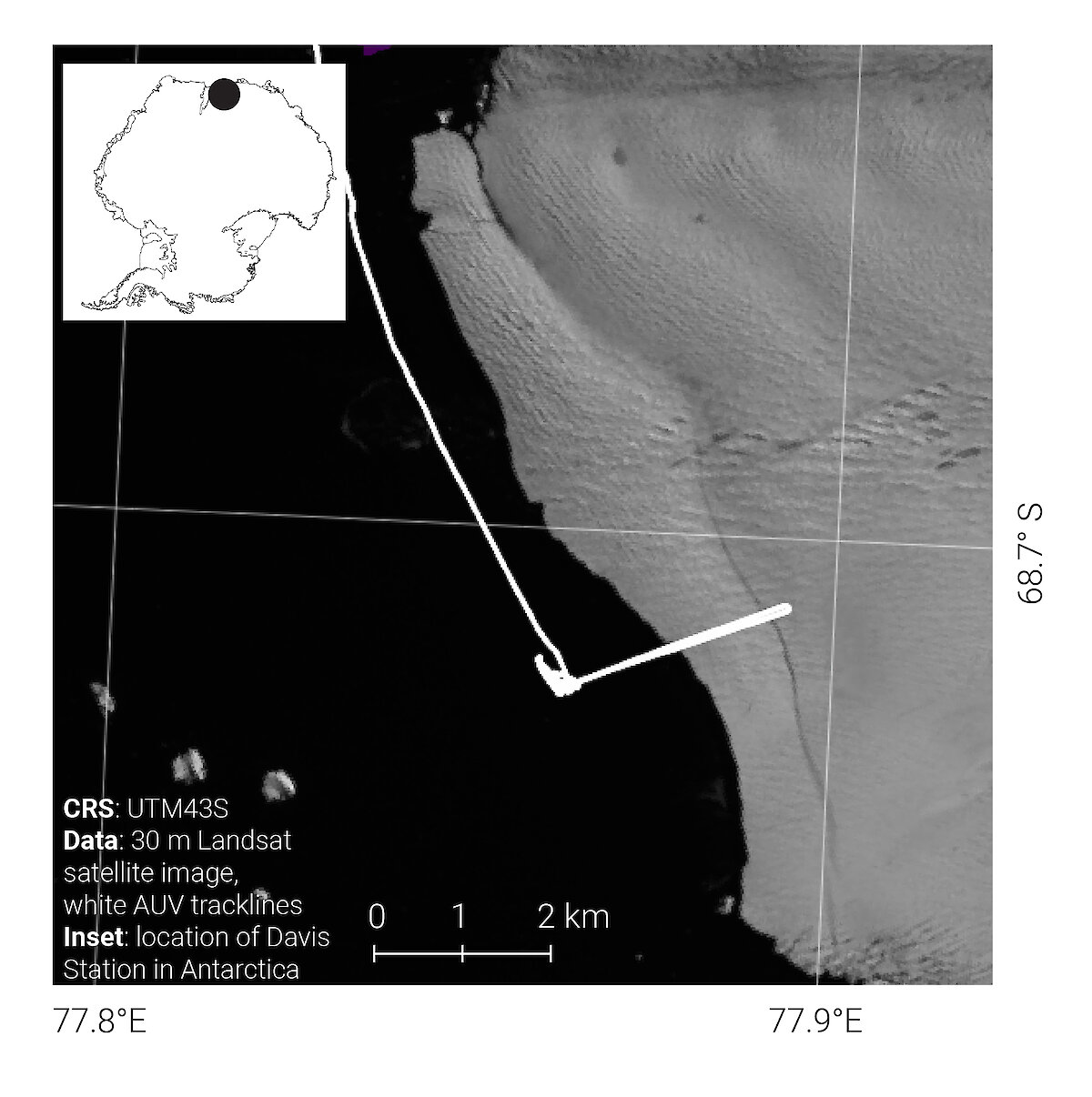
After successfully trialling nupiri muka in a Tasmanian alpine lake last year (see Australian Antarctic Magazine 35: 12–13, 2018), this year’s campaign aimed to deploy the AUV in Antarctic waters, under a floating ice shelf, and have it return safely. The Sørsdal Glacier, like most of the East Antarctic Ice Sheet, is under-mapped and under-sampled. We aimed to collect oceanographic data of the water column, and sonar data of the sea floor and under-ice topography, to determine how these factors may influence basal melting.
The first phase of the campaign involved in-water tests in front of Davis research station, to be sure all the AUV systems were optimal and calibrated and that we could safely and efficiently deploy and retrieve the vehicle from the boat ramp.
With phase one complete, the team progressed to phase two — open water surveying. Once the AUV and its support boats were launched, and all systems were operating correctly, the daily three-hour commute to the Sørsdal Glacier began.
The journey was slow going as nupiri muka had to be manually navigated between icebergs, bergy bits and ice slurry. The RV Howard Burton followed closely behind, limited to a speed of four knots, while an inflatable rubber boat went ahead to clear a path of open water. The procession was of keen interest to curious skuas and petrels, and the boats made a handy landing spot for Adélie penguins.
Once at the calving front of the Sørsdal Glacier, nupiri muka dived to a set depth and its systems were re-checked before missions began. Each mission usually involved either diving to a set altitude above the sea floor and maintaining that altitude over a survey line, or maintaining a set depth beneath the ice shelf.
One of the trickier aspects of the campaign was the lack of knowledge of any bathymetry in front of the glacier. Standard AUV missions usually rely on low resolution maps of hazards and features of interest, previously surveyed by a surface vessel. For our missions, nupiri muka was both the exploratory and mapping platform, surveying unknown areas of the sea floor while simultaneously taking measurements of its environment so it didn’t collide with any obstacles or venture into situations it could not return from.
nupiri muka had eight operational in-water days, travelling over 342 kilometres, 85 of which were in specific science missions, with the deepest dive over 1200 metres beneath the ocean’s surface. Three of the dives took the AUVunder the ice, travelling up to 700 metres into the ice cavity.
Australia now joins the United Kingdom and Sweden in being the only countries to have successfully deployed an AUV beneath an ice shelf. Now that we have proved nupiri muka can operate under an ice shelf, future deployments will see it venture up to tens of kilometres under ice shelves and up to 5000 metres deep.
The data collected this season has contributed to a better understanding of the sub-ice environment of this small ice shelf, and how nupiri muka behaves in this dynamic environment.
This campaign also demonstrates the successful operation of nupiri muka in Antarctica, delivering rare oceanographic and acoustic results. It serves as a test-case for far more ambitious, long-range deployments beneath other East Antarctic ice shelves, and has delivered vital experience in operating the AUV in very challenging Antarctic environments.
Erica Spain1, David Gwyther1 and Peter King2
1Institute for Marine and Antarctic Studies, University of Tasmania
2Australian Maritime College, University of Tasmania
*nupiri muka means ‘eye of the sea’ in palawa kani, the language of Tasmanian Aborigines.
This research was supported under Australian Research Council’s Special Research Initiative for Antarctic Gateway Partnership (Project ID SR140300001) and Australian Antarctic Science Project 5138.