
The seven metre-long, 1600 kilogram autonomous underwater vehicle (AUV), will be deployed around and beneath the Sørsdal Glacier, near Davis research station, to study the sea floor and underside of the ice shelf, and develop the AUV’s capability for future missions under larger Antarctic ice shelves.
The project, led by Professor Richard Coleman, Director of the Australian Research Council’s Antarctic Gateway Partnership*, will see a team of scientists and engineers deploy the torpedo-shaped AUV from the station’s boat ramp and travel alongside it in a small boat to the glacier, about 11km south-east of Davis.
While the AUV is at the surface the team will communicate with it over WiFi, but once under the ocean surface and ice shelf it must have all the information it needs to operate autonomously. To provide this the team use a geographic information system package to draw mission lines for the vehicle to follow and establish ‘rules’ for encountering changes in the environment, such as what to do if the sea floor is shallower than expected or the ice surface is too close, and when to come ‘home’.
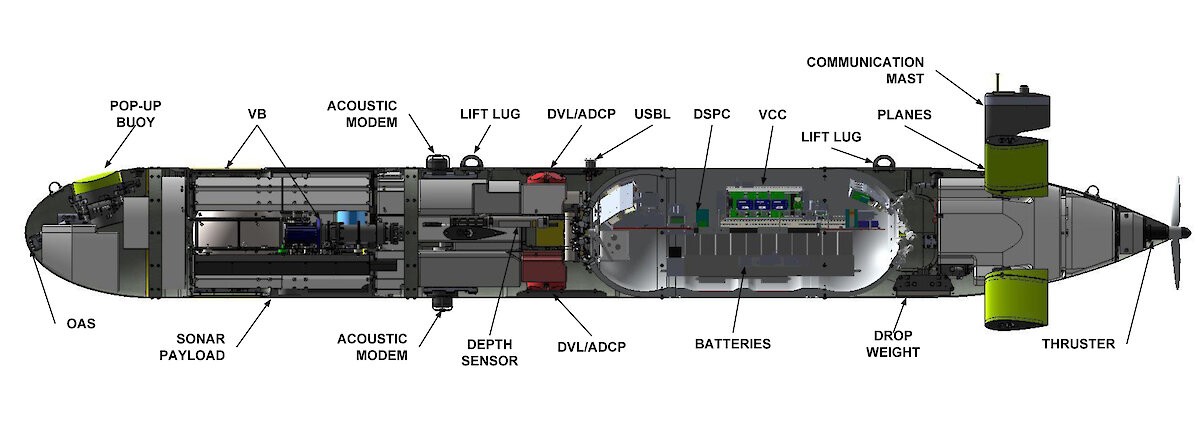
AUV engineer Peter King, from the University of Tasmania’s Australian Maritime College, said that the team will use a range of on-board sensors (see ‘Cut-away sub') to survey the front of the ice shelf and, all going well, venture beneath it, with increasing distance and duration as the AUV’s performance is assessed.
“First we’ll test the AUV in open water to ensure all the systems are performing as required, then we’ll survey the open water in front of the ice shelf, to understand the density layers and currents in the water column,” Mr King said.
“As we get closer to the face of the ice shelf we’ll build a map of the sea floor and the depth of the ice face below the surface, to understand the shape of the cavity opening. From there we’ll plan our safest entry path and venture beneath.”
The AUV has a multi-beam echosounder that emits sound waves and listens to the returning echoes, to build a picture of the environment. The echosounder can point downward to map the bathymetry (shape and depth) of the sea floor, or upward to map the shape and roughness of ice. A side-scan sonar can point sideways to map the shape of ice walls. Also onboard are a sub-bottom profiler that can see beneath sea floor sediment, instruments to measure water temperature, depth, salinity and velocity, and a magnetometer that measures the magnetism of geological features.
The upward looking echosounder will provide critical information to ice-ocean modellers, Dr David Gwyther, from IMAS, and Dr Ben Galton-Fenzi, from the Australian Antarctic Division, who are working to understand the speed of ice shelf retreat in East Antarctica and the contribution of ice shelf melt to sea level rise.
“One of the difficulties of estimating future sea level is understanding how the Antarctic ice sheet will contribute,” Dr Galton-Fenzi said.
“Half of the mass loss of the ice sheet is melted off the underside of ice shelves by the ocean, but we know little about how the ocean interacts with the ice sheet because these regions are so difficult to access.”
Dr Gwyther said the AUV would provide the very first look at the shape of the underside of the Sørsdal Glacier.
“The topography of the underside of the ice shelf is important because its ‘roughness’ creates turbulence in the water as it flows past the ice shelf,” he said.
“The rougher the surface, the more heat is mixed up from the ocean cavity below, and this affects melting.
“The side-scan sonar may also help us discriminate between ice that is melting, which will appear smoother, and ice that is refreezing, which will appear rougher.”
Measurements of ocean characteristics beneath the ice shelf will also provide important information on the temperature of the water that enters the cavity and where it has come from (such as warmer water from the continental shelf), and the speed the water is moving. This information will help scientists improve models of ice-ocean interactions, essential for projections of sea level rise.
For IMAS PhD student Erica Spain, the information revealed by the downward-looking echosounder is of most interest to her project investigating underwater habitats.
“I’d like to see if there are any glacial features under the ice, such as glacial moraines and cold seeps, which can tell us about the glacial and geological history of the region,” she said.
“We may also see some biology, as any time you have thick sediments and long residence times, you often get a build-up of methane and biological communities around it.”
Ms Spain has been working closely with the AUV team for the past 12 months to test the vehicle’s capabilities for mapping sand waves and sponge gardens in northern Tasmania and Bass Strait.
“We’ve been mapping features at spatial scales we expect to find under the Sørsdal Glacier and looking to see how much data we can get out of it with minimal processing, and how accurate that data is,” she said.
“Most recently we conducted a full dress rehearsal at Lake St Clair in Tasmania’s highlands in winter — the closest we could get to simulating Antarctic conditions.”
After a year of preparation and practice the team are confident the AUV will perform as expected, but there will no doubt be challenges and learnings in this first of many icy missions.
“The lessons learned from this deployment of the AUV will help shape future deployments at locations that are likely to be more critical for sea level rise, such as the Totten and Amery ice shelves,” Dr Galton-Fenzi said.
The AUV (named nupiri muka or ‘eye of the sea’ in palawa kani, the language of Tasmanian Aborigines) is funded by the Australian Government through the Antarctic Gateway Partnership — a $32 million Special Research Initiative of the Australian Research Council that aims to provide new insights into the role of Antarctica and the Southern Ocean in the global climate system. The Australian Maritime College contributed $3 million to the cost of the vehicle.
Wendy Pyper
Australian Antarctic Division
*The Australian Research Council’s Antarctic Gateway Partnership is hosted at the Institute for Marine and Antarctic Studies, University of Tasmania. Professor Coleman leads Australian Antarctic Science Project 5138.